


1、单选题:
现代自动控制的应用有
选项:
A: 自动驾驶
B: 自动机器人
C: 制造自动化
D: 以上都对
答案: 【 以上都对】
2、单选题:
闭环控制系统应该具有下列什么特点
选项:
A: 抗干扰能力
B: 根据指令产生期望的输出
C: 对系统参数变化不敏感
D: 以上都是
答案: 【 以上都是】
3、单选题:
开环控制系统是指( )对系统没有控制作用
选项:
A: 系统输出量
B: 系统特性
C: 干扰
D: 系统输入量
答案: 【 系统输出量】
4、单选题:
控制理论是研究系统的( )问题。
选项:
A: 静态
B: 能量守恒
C: 动态
D: 物理学
答案: 【 动态】
5、单选题:
控制工程主要研究并解决的问题之一是( )
选项:
A: 系统已定,输入不确定,求系统的输出
B: 系统已定,输入已知,求系统的输出
C: 系统已定,规定系统的输入
D: 系统不定,输入已知,求出系统的输出
答案: 【 系统已定,输入已知,求系统的输出】
6、单选题:
开环系统与闭环系统最本质的区别是( )
选项:
A: 开环系统的输出对系统无控制作用,闭环系统的输出对系统有控制作用
B: 开环系统的输入对系统无控制作用,闭环系统的输入对系统有控制作用
C: 开环系统不一定有反馈回路,闭环系统有反馈回路
D: 开环系统不一定有反馈回路,闭环系统也不一定有反馈回路
答案: 【 开环系统的输出对系统无控制作用,闭环系统的输出对系统有控制作用】
7、单选题:
控制论的中心思想是
选项:
A: 一门既与科学技术有与基础科学紧密联系的科学
B: 通过信息的传递、加工处理和反馈来进行控制
C: 抓住一切通讯与控制系统的共有特点
D: 对生产力的发展、提高具有重大影响
答案: 【 通过信息的传递、加工处理和反馈来进行控制】
8、单选题:
在闭环控制系统中,基本工作原理是
选项:
A: 不断检测偏差并纠正偏差
B: 不断检测输入信号并纠正之
C: 不断检测输出信号并纠正之
D: 不需检测和纠正信号
答案: 【 不断检测输出信号并纠正之】
1、单选题:
已知某系统开环传递函数为G(s)=90/[(s+2)(s+15)],则开环增益、转角频率为
选项:
A: 90 0.5 0.067
B: 90 2 15
C: 3 2 15
D: 3 0.5 0.067
答案: 【 3 2 15】
2、单选题:
绘制系统Bode图,系统的传递函数为G(s)=10(0.1s+1)/[s(2s+1)]
选项:
A: 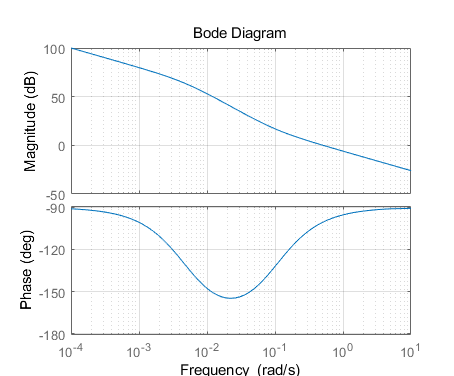
B: 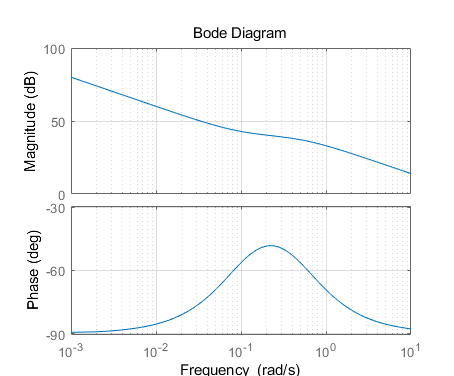
C: 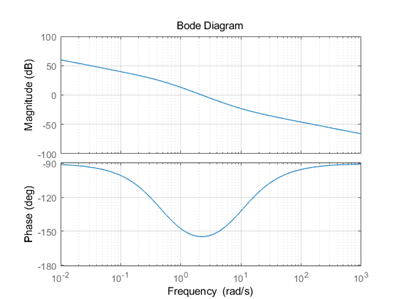
D: 
答案: 【 】
3、单选题:
已知系统的开环传递函数为G(S)H(S) = K(τS+1)/[(T1S+1)(T2S+1)(T2S2+2ζTS+1)],则它的对数幅频特性渐近线在ω趋于无穷大处的斜率为( )dB/十倍频程。
选项:
A: -20
B: -40
C: -60
D: -80
答案: 【 -60】
4、单选题:
某系统的开环传递函数为2(2s+3)/[s(5s+2)],则此系统的开环增益为( )
选项:
A: 3
B: 2
C: 1
D: 5
答案: 【 3】
5、单选题:
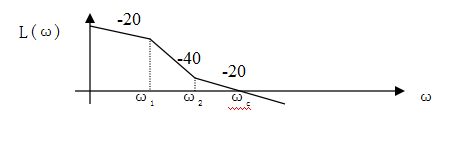
已知最小相位系统的开环对数幅频特性曲线的渐近线如下图所示,试确定其开环增益K()
选项:
A: 0
B: 5
C: 10
D: 12
答案: 【 10】
6、单选题:
求开环增益K。ωc是穿越频率,对应幅频0dB。
选项:
A: ωc^2/ω1
B: ωc^2/ω1ω2
C: ωcω2/ω1
D: ωcω1/ω2
答案: 【 ωcω2/ω1】
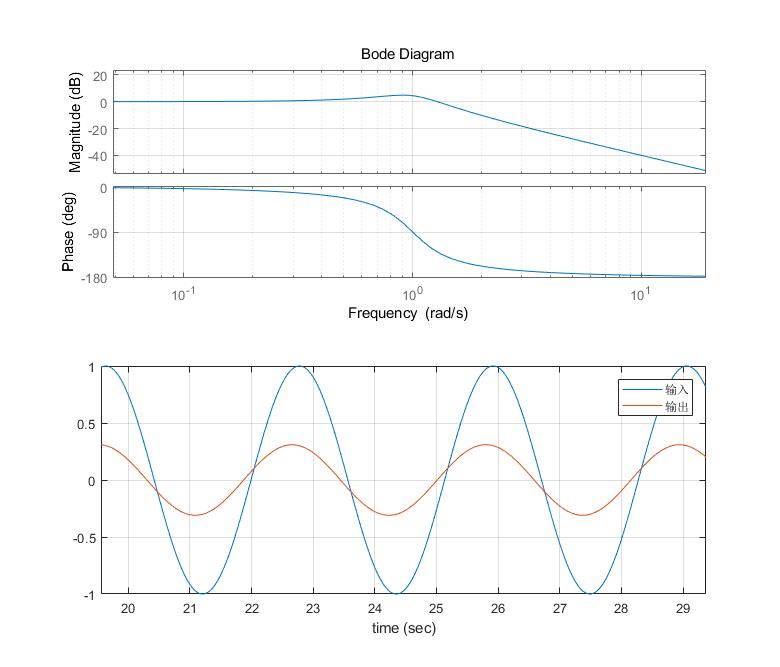
7、判断题:
上图是某系统的bode图,下图是某系统从0秒开始输入正弦波对应的输出正弦波。试估计两幅图是否描述了同一个系统?
选项:
A: 正确
B: 错误
答案: 【 错误】
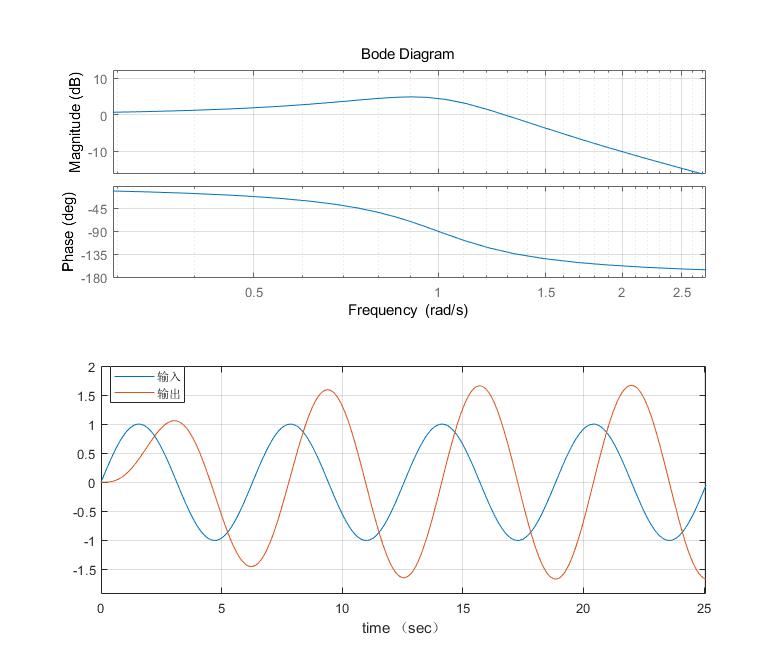
8、判断题:
上图是某系统的bode图,下图是某系统从0秒开始输入正弦波对应的输出正弦波。试估计两幅图是否描述了同一个系统?
选项:
A: 正确
B: 错误
答案: 【 正确】
1、单选题:
单位负反馈系统的开环传递函数为 ,现有下面四种串联校正装置,均为最小相位系统,若要使系统的稳态误差不变,而减小超调量,加快系统的动态响应速度,应选取哪种校正装置。
,现有下面四种串联校正装置,均为最小相位系统,若要使系统的稳态误差不变,而减小超调量,加快系统的动态响应速度,应选取哪种校正装置。
选项:
A: 
B: 
C: 
D: 
答案: 【 】
2、单选题:
单位负反馈系统的开环传递函数为 ,现有下面四种串联校正装置,均为最小相位系统,若要减小系统的稳态误差,并保持系统的超调量和动态响应速度不变,应选取哪种校正装置。
,现有下面四种串联校正装置,均为最小相位系统,若要减小系统的稳态误差,并保持系统的超调量和动态响应速度不变,应选取哪种校正装置。
选项:
A: 
B: 
C: 
D: 
答案: 【 】
3、判断题:
系统校正的实质就是通过加入校正装置的零、极点,来改变整个系统的零、极点分布,从而改变系统的频率特性,以满足性能指标要求。
选项:
A: 正确
B: 错误
答案: 【 正确】
4、判断题:
系统校正中常用的性能指标包括:调整时间、上升时间、超调量、相角裕度、幅值裕度、剪切频率、稳态误差等。
选项:
A: 正确
B: 错误
答案: 【 正确】
5、判断题:
图示为最小相位系统的开环对数幅频特性曲线,采用串联校正后,曲线从浅红色变为深红色,那么该串联校正为相位超前校正。

选项:
A: 正确
B: 错误
答案: 【 错误】
6、判断题:
图示为最小相位系统的开环对数幅频特性曲线,采用串联校正后,曲线从浅红色变为深红色,那么该串联校正为相位滞后校正。

选项:
A: 正确
B: 错误
答案: 【 错误】
7、判断题:
PID调节器中比例环节P的作用是使被控量朝着减小偏差的方向变化。
选项:
A: 正确
B: 错误
答案: 【 正确】
8、判断题:
PID调节器中积分环节 I 的作用是为了消除系统的稳态误差,但会减小系统的抗高频干扰能力。
选项:
A: 正确
B: 错误
答案: 【 错误】
9、判断题:
PID调节器中微分环节 D 的作用是能够预测误差的变化趋势,可在误差信号出现之前就起到修正误差的作用。
选项:
A: 正确
B: 错误
答案: 【 正确】
1、单选题:
线性系统与非线性系统的根本区别在于( )。
选项:
A: 线性系统微分方程的系数为常数,而非线性系统微分方程的系数为时变函数
B: 线性系统只有一个外加输入,而非线性系统有多个外加输入
C: 线性系统满足叠加原理,非线性系统不满足叠加原理
D: 线性系统在实际系统中普遍存在,而非线性系统在实际中存在较少
答案: 【 线性系统满足叠加原理,非线性系统不满足叠加原理】
2、单选题:
1. 某系统的微分方程为  ,它是什么系统?
,它是什么系统?
选项:
A: 线性时变系统
B: 线性定常系统
C: 非线性时变系统
D: 不能确定
答案: 【 线性定常系统】
3、单选题:
图示系统,k为弹簧刚度,B为阻尼系数,m为质量,外力x(t)为输入,质量块m的位移y(t)为输出,则系统的微分方程为( )。

选项:
A: 
B: 
C: 
D: 
答案: 【 】
4、单选题:
图示质量弹簧阻尼系统,以外力f(t)为输入量,位移y(t)为输出量的运动微分方程可以对该系统进行描述,那么该系统的阶次为( )

选项:
A: 1
B: 2
C: 3
D: 取决于输入量f(t)
答案: 【 2】
5、单选题:
图示机械系统,x(t)为输入位移,y(t)为输出位移,k为弹簧刚度,B为阻尼系数,系统的微分方程为( )

选项:
A: 
B:

备案号:冀ICP备20010840号 2020-2099辉辉网络科技 All Rights Reserved


{kind=link}