


1、判断题:
机械臂的奇异分为内部奇异和边界奇异两种。
选项:
A: 正确
B: 错误
答案: 【 正确】
2、判断题:
描述空间两个关节轴之间相对位姿的两个参数是连杆长度和两轴线之间的偏角。
选项:
A: 正确
B: 错误
答案: 【 正确】
3、判断题:
平面两连杆机械臂能够使其末端(工具)到达工作空间内的所有位姿。
选项:
A: 正确
B: 错误
答案: 【 错误】
4、判断题:
通常我们称拥有三个连杆的操作臂为RRR(或3R)机构。
选项:
A: 正确
B: 错误
答案: 【 错误】
5、判断题:
驱动器空间描述、关节空间描述、笛卡尔空间描述都可以描述操作臂的空间位姿。
选项:
A: 正确
B: 错误
答案: 【 正确】
6、填空题:
操作臂可以看做是由一系列刚体通过()连接而成的一个运动链。
答案: 【 关节##%_YZPRLFH_%##运动副】
7、填空题:
在求机械臂运动学逆问题时可能出现多解现象,即同一位姿对应于多于一组的关节变量,称为退化问题。求逆时,也可能存在奇异问题,当进行逆变换的计算时要做除法,而当分母趋于()时便会出现奇异现象。
答案: 【 零】
8、填空题:
灵巧工作空间指机器人的末端执行器能够从各个方向上到达的空间区域;可达工作空间是机器人至少从一个方向上有一个方位可以达到的空间。显然,()是()的子集。
答案: 【 灵巧工作空间 可达工作空间】
9、填空题:
在不限制关节角范围的情况下,图中的机械臂末端到达同一位置时的关节角最多可以有()种不同的解。
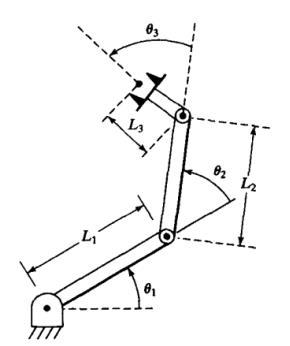
答案: 【 4】
10、填空题:
具有6个旋转关节的操作臂存在封闭解的充分条件是相邻的()个关节轴线相交于一点。
答案: 【 3##%_YZPRLFH_%##三】
1、判断题:
刚体上任一点的角速度相同。
选项:
A: 正确
B: 错误
答案: 【 正确】
2、判断题:
多关节机械臂中,相邻连杆(i-1)和连杆(i)之间的角速度关系可描述如下:两连杆之间为移动关节时,连杆(i)的角速度等于连杆(i-1)的角速度。
选项:
A: 正确
B: 错误
答案: 【 正确】
3、判断题:
由移动关节连接的两个相邻连杆 和连杆
和连杆 ,连杆末端的线速度包括:连杆相对于连杆的线速度、连杆的线速度、以及由于连杆的角速度而产生的线速度。
,连杆末端的线速度包括:连杆相对于连杆的线速度、连杆的线速度、以及由于连杆的角速度而产生的线速度。
选项:
A: 正确
B: 错误
答案: 【 正确】
4、判断题:
在机器人中用雅克比矩阵描述机器人末端线速度和关节角速度之间的关系。
选项:
A: 正确
B: 错误
答案: 【 错误】
5、判断题:
雅克比矩阵的第(i)列反映的是关节(i)的速度或角速度对末端位姿的影响。
选项:
A: 正确
B: 错误
答案: 【 错误】
6、判断题:
在机器人运动过程中,其雅克比矩阵也在不断地变化。
选项:
A: 正确
B: 错误
答案: 【 正确】
7、填空题:
由转动副连接的两个连杆,杆长分别为200mm和300mm。如转动副的角速度为0.5弧度/s,连杆1自身的角速度为1弧度/s(该角速度的方向与转动副的角速度方向相同)。此时,连杆2末端的角速度为()弧度/s。
答案: 【 1.5】
8、填空题:
由转动副连接的两个连杆,杆长分别为200mm和300mm。如转动副的角速度为0.5弧度/s,连杆1自身的角速度为1弧度/s(该角速度的方向与转动副的角速度方向相反)。此时,连杆2末端的角速度为()弧度/s。
答案: 【 0.5】
9、填空题:
由转动副连接的两个连杆,杆长分别为200mm和300mm。如转动副的角速度为0.5弧度/s,连杆1自身的角速度为1弧度/s(该角速度的方向与转动副的角速度方向垂直)。此时,连杆2末端绕转动副轴线方向的角速度为()弧度/s。
答案: 【 1】
10、填空题:
由转动副连接的两个连杆,杆长分别为200mm和300mm。如转动副的角速度为0.5弧度/s,连杆1自身的角速度为1弧度/s(该角速度的方向与转动副的角速度方向垂直)。此时,连杆2末端绕转动副轴线垂直方向的角速度为()弧度/s。
答案: 【 0.5】
1、判断题:
机器人的动力学问题与机器人的运动学不同,在机器人的运动学中主要是研究连杆的位置、速度和加速度而不考虑连杆质量的影响,而在机器人动力学问题的研究中需要考虑质量的影响和作用。
选项:
A: 正确
B: 错误
答案: 【 正确】
2、判断题:
牛顿-欧拉方程方法和拉格朗日方程方法是研究机器人动力学的两种主要的方法,两种方法的分析过程有所不同但结果是一致的。
选项:
A: 正确
B: 错误
答案: 【 正确】
3、判断题:
物体惯量的大小与所参考的坐标系有关,当选取适当的坐标系时可以使其惯性张量矩阵为变为对角矩阵。
选项:
A: 正确
B: 错误
答案: 【 正确】
4、判断题:
水平面内运动的两连杆机械臂,连杆的质量分别为 和
和 ,建立该机械臂的动力学方程后可以得出,关节力矩将与连杆质量、连杆运动的加速度、所受的摩擦力以及所受的重力作用有关。
,建立该机械臂的动力学方程后可以得出,关节力矩将与连杆质量、连杆运动的加速度、所受的摩擦力以及所受的重力作用有关。
选项:
A: 正确
B: 错误
答案: 【 错误】
5、判断题:
机器人的静力分析是指其静态作用力的分析,在分析时假定机器人处于静止的平衡状态,无法得到机器人在惯性力作用下的受力结果,因此当需要考虑惯性力的作用时必须建立动力学方程才能得到。
选项:
A: 正确
B: 错误
答案: 【 错误】
6、填空题:
一般情况下,在机器人动力学方程中包含()项、向心力和哥氏力项、以及重力项。
答案: 【 惯性力】
7、填空题:
粘滞摩擦与干摩擦不同。一般情况下,粘滞摩擦力的值是粘滞摩擦系数与()的乘积。
答案: 【 速度】
8、填空题:
在应用拉格朗日方程方法建立机器人的动力学方程时,尽管所建立的动力学方程比较复杂,但是并没有考虑机器人的形变,即认为机器人的所有连杆都是()。
答案: 【 刚体】
9、填空题:
对于机器人的动力学,有两个相反的问题。一是已知机械臂各关节的作用力或力矩,求各关节的位移、速度和加速度,进而求得运动轨迹。另一个是已知机械手的运动轨迹,即各关节的位移、速度和加速度,求各关节所需的()。
答案: 【 作用力或力矩##%_YZPRLFH_%##驱动力或力矩】
10、填空题:
从机器人动力学方程可

备案号:冀ICP备20010840号 2020-2099辉辉网络科技 All Rights Reserved


{kind=link}